
Radarová interferometrie zpracovává páry družicových (radarových) snímků daného území a na jejich základě vyhodnocuje buď digitální model terénu, nebo model deformací. Dle zahraničních článků se používá především k mapování postseismických deformací, které jsou většinou nezanedbatelné jak co do rozsahu, tak do velikosti. Pro mapování sesuvů tak vhodná není a je nutno mít na paměti několik omezení:
velikost a orientaci posunů, které nastaly v daném časovém období,
dobu snímkování s ohledem na rychlost sesuvů,
vegetační pokrytí zájmového území a jeho okolí (pro srovnání).
Každý pixel na radarovém snímku obsahuje nejen amplitudu (odpovídající odrazivosti), ale i fázi, odpovídající vzdálenosti satelitu od daného místa na zemském povrchu. Tato fáze je ale pouze v intervalu (-pi, pi), který odpovídá vzdálenosti ( 0, 2.8) cm, protože se měří vzdálenost tam a zpět a vlnová délka radaru (pro ERS) je 5.6 cm. Z tohoto důvodu nejde o vzdálenost jako takovou, nýbrž jen o doměrek vůči celistvému násobku poloviny této vlnové délky.
Fáze jako taková nemá praktický smysl, protože vzdálenost od daného místa na Zemi k satelitu nelze určit s dostatečnou přesností. Smysl má ale rozdíl této fáze mezi dvěma snímky: ať už pocházejí tyto snímky z různých míst, nebo ze stejného místa v různém čase. Pocházejí-li snímky z různých míst (musí však snímkovat stejné území), používá se metoda interferometrie k určení digitálního modelu terénu v daném území, je-li mezi snímky nezanedbatelný časový rozdíl, lze metodou interferometrie dojít k modelu deformací povrchu Země v daném území.
Tvorba interferogramu není nic jiného než odečtení fází obou snímků - tak, aby výsledná fáze byla v intervalu (-pi, pi). Po vygenerování interferogramu je nutné ještě odečíst fázi referenčního tělesa (Země). Interferogram z principu obsahuje
topografickou složku, danou závislostí vzdálenosti satelit - povrch Země na výšce,
deformační složku, zahrnující pohyby nastalé mezi akvizicí obou snímků,
chyby v poloze družic a nehomogenity atmosféry (obě jsou "dlouhovlnné", tj. neprojevují se jako šum, ale jako "naklonění oblasti").
Předem uveďme, že vlivu atmosféry se nelze zbavit úplně, ale lze jej ovlivnit vhodným výběrem snímků v závislosti na počasí. Chyby v poloze družice eliminovat lze, ale tento postup není jednoduchý. V případě tvorby digitálního modelu terénu eliminujeme deformační složku tak, že vybíráme snímky s krátkou časovou základnou, a v případě tvorby deformační mapy eliminujeme topografickou složku odečtením fáze odpovídající digitálnímu modelu terénu. Tento může být buď zjištěný interferometrickou metodou (tří- nebo čtyřsnímková metoda), nebo může pocházet z jiných zdrojů (dvousnímková metoda).
Představme si dráhu družice nad daným územím (resp. vedle něj, viz obrázek) jako přímku. Radar měří vzdálenost toho kterého zobrazeného území (velikosti jednoho pixelu) od této přímky. To znamená, že není schopen změřit, pokud se bod pohne z jednoho místa jinam, ale vzdálenost povrchu od družicové dráhy zůstane stejná.
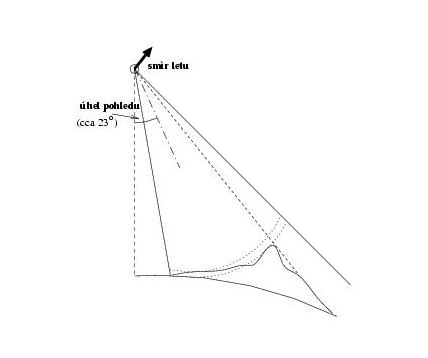
Dále zdůrazněme, že radar měří pouze deformaci ve směru paprsku, tj. cca 23 stupňů od svislice (ERS), a na deformaci svislou je třeba tento údaj přepočítat.
Radarem však neměříme fázi jako takovou, nýbrž pouze její doměrek, a to do celistvého násobku poloviny vlnové délky (2.8cm). V praxi to znamená, že pokud se část území pohnula mezi oběma snímky o 10.0 cm a ostatní území se nepohnulo vůbec, naměříme pohyb 1.6 cm. Pokud se některá část území nepohnula vůbec, zatímco jiná o těchto 10 cm, a přechod mezi nimi je pozvolný, najdeme v této oblasti tzv. "proužky", signalizující posun o polovinu vlnové délky. Je-li však tento posun moc prudký, dojde k dekorelaci.
Navíc zde platí, že můžeme měřit pouze posuny relativní, tj. vůči nějakému stabilnímu území. Pokud se celé zpracovávané území pohne o stejnou vzdálenost, bude výsledek stejný, jako když se nepohne vůbec (fázový obraz interferogramu bude homogenní).
Teoretická hodnota maximální "prudkosti" změny je půl proužku na pixel, tj. 2.8 cm / 20 m (přibližně), nicméně vzhledem k všudypřítomnému šumu a možné dekorelaci (viz dále) je zpracování takovýchto dat velmi nejisté.
Na druhou stranu, pokud jsou posuny příliš malé, ztratí se v "šumu" a nelze je v interferogramu nalézt. Velikost posunů je u sesuvů možné ovlivnit intervalem mezi akvizicemi zpracovávaných snímků.
Co se týče přesnosti, citlivosti a spolehlivosti této metody, odkazuji na kapitolu Práh vnímání/citlivost (v daných podmínkách).
Fázový radarový obraz jednoho pixelu je superpozicí mnoha malých odražečů - čím ten který odražeč odráží více (ve směru k radaru), tím má oproti ostatním větší váhu. Vzhledem k tomu, že jeden pixel má rozměr cca 20 x 20 m, je těchto malých odražečů opravdu hodně. Vzhledem k tomu, že vlnová délka radaru je 5.6 cm, projevují se ve fázi i malé pohyby.
Interferogram není nic jiného než rozdíl fází dvou snímků. Kromě interferogramu se ještě počítá tzv. koherenční obraz, který znázorňuje "spolehlivost" fáze v tom daném místě. Je to statistický ukazatel udávající rozptyl fázového rozdílu v okolí daného pixelu (např. 5 x 5 pixelů). Pokud je oblast na obou snímcích stejná (nepohnula se), je fáze interferogramu v celé této oblasti konstantní. Pokud došlo k pohybu celé této malé oblasti, je tato fáze též konstantní, i když různá od svého okolí. Koherence bude v této oblasti vysoká, pokud území zabírá alespoň 5 krát 5 pixelů. Pokud ale došlo k pohybu nekonzistentnímu, tzn. každý odražeč se pohnul jinak, fáze interferogramu bude v různých pixelech různá, víceméně náhodná, a koherence bude nízká. Takové oblasti říkáme oblast dekorelovaná.
I na fázovém obrázku je často vidět, že v nekorelovaných územích je fáze "zrnitá", tj. náhodná.
Příčiny dekorelace jsou různé:
oba snímky se velmi liší zorným úhlem, či jsou z jiné družicové dráhy či dokonce z jiné družice. Toto lze snadno obejít při výběru dat,
velkou překážkou je vegetace. Listy stromů či tráva se hýbají větrem a nelze je zastihnout dvakrát na stejném místě, a do souhrnné fáze přispívají velkým dílem,
typicky dekorelovaným územím jsou vodní plochy. Jakožto zrcadlový odražeč odrážejí téměř všechnu energii pryč od radaru, a to málo, co se k radaru dostane, je spíše šum,
sesuvy a jiné druhy deformací, které nejsou "stabilní" v měřítku cca 100 krát 100 metrů, či proběhly ve směru letu družice,
další vlivy, např. rozorání pole, nové stavby apod. (lze částečně eliminovat výběrem dat).
Dodejme, že tyto příčiny od sebe nelze v dekorelovaných územích rozeznat.
Klidná území definujeme tak, že v nich nedochází k deformacím. Zde též nemá smysl uvažovat území dekorelovaná, protože informace o nich je velmi nespolehlivá. Budeme tedy uvažovat pouze území s vysokou koherencí.
V těchto územích je fázový obraz jednobarevný, tedy homogenní.
Teoretická citlivost metody je zhruba centimetr. Tuto citlivost však zhoršují jiné vlivy, např. špatné rozbalení fáze při použití třísnímkové metody (nebezpečí v případě, že zpracovávaná oblast má několik oblastí s vysokou koherencí, které jsou však odděleny oblastmi s nízkou koherencí - zde mohou algoritmy pro rozbalení fáze způsobit chybu ve velké části území), chyby v externím digitálním terénním modelu (u dvousnímkové metody), chyby v trajektoriích družic, atmosférické vlivy, velký rozdíl v polohách obou družic apod. Je zřejmé, že pokud vlivem nějaké takové příčiny dojde k větší směrodatné odchylce fáze v daném území, citlivost identifikace sesuvů se zhorší.
Území, kde došlo k deformaci, se ve výsledném (diferenciálním) interferogramu objevují jako oblasti "zbarvené" jinak, než odpovídá barvě jejich okolí. Tato území bývají typicky malá (několik pixelů, 1 pixel odpovídá oblasti cca 20 x 20 metrů), což ztěžuje jejich identifikaci a taktéž důkaz spolehlivosti. Spolehlivost se ověřuje generací více interferogramů a jejich srovnáním, což v našem případě nebylo vzhledem k nedostatku dat možné.
Přesnost metody, pokud bude k dispozici dostatečné množství dat, by mohla být i zhruba půl centimetru.
Aktualizace 6. 02. 2021, ivca@insar.cz